





Şüalar üçün BD200E CNC Qazma Maşını




| Item adı | Parametr | |||
| BD150C-3 | BD200E-3 | |||
| Ma ölçüsüTerial H Şüası | Maksimum uzunluqH şüası | 2100 mm | 1600 mm | |
| Maksimum ölçüH şüası(en × hündürlük) | 1500*1500mm | 1000*2000 mm | ||
| Minimum bölmə ölçüsüH şüası(en × hündürlük) | 500*500mm | 400*1000 mm | ||
| İşləyirmasa (Fqarışıq) | İş masasının yerdən hündürlüyü | 900 mm | ||
| İş masasında T-yuvasının eni | 28 mm | |||
| Gantry uzununa hərəkəti (X-ox) | X oxu vuruşu | 21 m | 16 m | |
| X oxlu servo motor gücü | 2×3.0kVt | |||
| Güc başlığının portal şüasında yan hərəkəti (V-ox) | V oxlu vuruş | 1500 mm | 1980 mm | |
| V oxlu servo motor gücü | 1.5KVt | |||
| İkiqat gantrya sütununda güc başlığının şaquli hərəkəti (U-ox, W-ox) | U-ox, W-ox vuruşu | 1500 mm | 980 mm | |
| U-ox, W-ox servo motor gücü | 2×1.5kVt | |||
| Masa tipli qazma (sürüşmə başlığı) | Miqdar | 3 | ||
| Maksimumdəlikqazma diametri | 12~50 | |||
| MiliRPM(tezlik çevrilməsi 30-100Hz) | 120-400 dövr/dəq | 120-560 dövr/dəq | ||
| İplik Mors konusvari | 4 | 8 | ||
| Mili mühərrik gücü | 3×7.5kVt | |||
| Ox istiqamətində hərəkət (1 ox, 3 ox) | 600 mm | 780 mm | ||
| Ox istiqamətində hərəkət (2 oxlu) | 700 mm | 580 mm | ||
| 1 oxlu, 2 oxlu, 3 oxlu idarəetmə rejimi | AC servo motor, top vintli ötürücü | |||
| 1 oxlu, 2 oxlu, 3 oxlu qidalanma sürəti | 0-4000 mm/dəq | |||
| 1 oxlu, 2 oxlu, 3 oxlu servo mühərrik gücü | 3×1.5kVt | |||
| Hidravlik nasosun mühərrik gücü | 3+4 kVt | |||
| Çiplərin çıxarılması və soyudulması | Çip konveyer növü | Düz zəncir | ||
| Çip çıxarma sürəti | 1 m/dəq | |||
| Çip konveyer mühərrikinin gücü | 2x0.75KW | |||
| Soyutma nasosunun mühərrik gücü | 0.45KVt | |||
| Eelektrik sistemi | Rəqəmsal idarəetmə sistemi | PLC | ||
| Nömrə | 8 | |||
| Dəzgahın ümumi gücü | Təxminən 47 kVt | |||
| Ümumi ölçü (L ×W×H) | Təxminən 26m × 4.5m × 4.2m | |||
| Çəki | Təxminən 60 ton | |||
1. Maşın əsasən yataq, portal, başlıq, elektrik sistemi, hidravlik sistem, soyutma çipinin çıxarılması sistemi, aşkarlama sistemi və s.-dən ibarətdir.
2. Maşın, çarpayının uzunluğunu azalda və döşəmə sahəsini qənaət edə bilən gantry hərəkətli və sabit iş masasının quruluşunu qəbul edir.

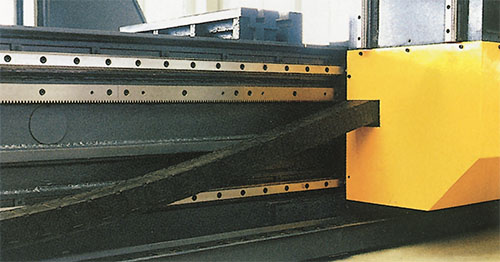
3. Portal hərəkəti (x oxu) xətti kürə bələdçisi, AC servo mühərriki və aşağı əks əyilmə dayağı və dişli ilə idarə olunur. Xətti kürə bələdçisi, AC servo mühərriki və kürə vintli ötürücü, portal çarpaz tirinin və sürüşmə lövhəsinin iki şaquli sütunda (U, V, W) hərəkətini istiqamətləndirmək üçün istifadə olunur. Hər bir qazma başlığının (1, 2 və 3 oxları) qidalanma hərəkəti, servo mühərrik və kürə vinti ilə idarə olunan xətti diyircəkli bələdçi ilə idarə olunur.
4. Mili şirkətimiz tərəfindən istehsal olunan CNC yem qazma güc başlığını qəbul edir.

5. Maşının alt hissəsi düz zəncir tipli çip təmizləyicisi ilə təchiz olunmuşdur və çip konveyeri su nasosu və soyuducu maye filtrasiya dövriyyə cihazı ilə təchiz edilmişdir.
6. Hidravlik sistem əsasən X oxunun yerləşdirilməsi və hər iki tərəfdəki güc başlıqlarının kilidlənməsi və balanslaşdırılması üçün istifadə olunur.
7. Elektrik sistemi PLC tərəfindən idarə olunur və yuxarı kompüterlə təchiz olunub. Material kompüter tərəfindən daxil edilir və saxlanılır, ona görə də işləmək asandır.
| YOX. | Ad | Brend | Ölkə |
| 1 | Xətti top bələdçi cütü | HIWIN/PMI | Tayvan, Çin |
| 2 | PLC | Mitsubishi | Yaponiya |
| 3 | Servo motoru və sürücüsü | Mitsubishi / Panasonic | Yaponiya |
| 4 | Hidravlik klapan | ATOS | İtaliya |
| 5 | Yağ nasosu | Justmark | Tayvan, Çin |
| 6 | Düymə, göstərici işığı | Şnayd | Fransa |
| 7 | Zəncirvari sürükləmə | JFLP | Çin |
Qeyd: Yuxarıda göstərilənlər bizim standart təchizatçımızdır. Əgər yuxarıda göstərilən təchizatçı hər hansı xüsusi məsələ səbəbindən komponentləri təmin edə bilmirsə, digər markanın eyni keyfiyyətli komponentləri ilə əvəz edilə bilər.



Şirkətin qısa profili  Zavod Məlumatı
Zavod Məlumatı  İllik İstehsal Gücü
İllik İstehsal Gücü  Ticarət Qabiliyyəti
Ticarət Qabiliyyəti 





